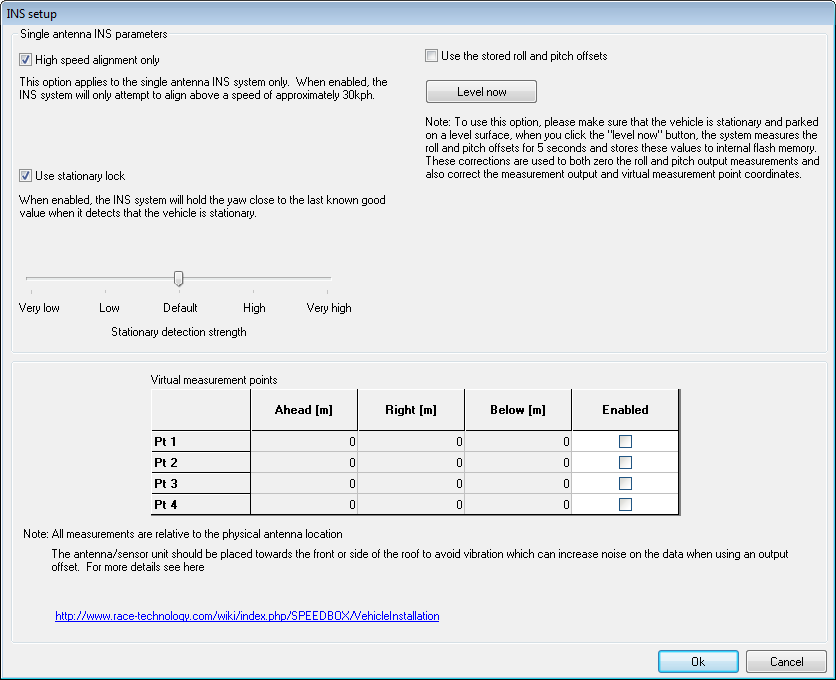
INS Setup
High speed alignment only (applies to single antenna SPEEDBOX-INS only):
This parameter only applies to the single antenna version of the SPEEDBOX-INS. For the single antenna version, the INS system is initially aligned using the velocity vectors from the GPS system. When the high speed alignment option is not enabled, the minimum speed for alignment is 5kph, in order that the INS can be aligned in low speed situations, such as testing earth moving equipment. However, where there is no problem in attaining higher speeds for alignment it is recommended to enable this option, in which case the minimum speed for alignment is 30kph, in order to remove the possibility of incorrect initial alignment during reversing.
Use stationary lock (applies to single antenna SPEEDBOX-INS only):
When this tick-box is enabled, the SPEEDBOX-INS will hold the yaw at the last known good value when it detects that the unit is stationary. This avoids the yaw drifting whilst stationary and hence reduces the time required to re-attain full accuracy following pull-away from stationary.
The stationary detection uses both speed and inertial measurements in order to be robust in as many situations as possible (e.g. under a covered railway station with no GPS reception). Since the unit may be operated in a wide range of vibrationary environments, the "Stationary detection strength" slider is provided in order to help match the inertial stationary detection to the expected vibration during stationary operation. Put simply, the slider should be set lower in an environment that has low vibration when stationary, and set higher in an environment that has high vibration when stationary. As a very rough guide:
Electic train (almost zero vibration when stationary): Very low
Road car: Low or Default
Race car: Default or High
Anything with very high vibration or resonance when stationary: Very high.
Level now:
This button sends a command to the SPEEDBOX to measure and store the current offset of the antenna (SPEEDBOX-INS) or base unit (SPEEDBOX) from the horizontal. This should only be done when the vehicle is stationary and level. The SPEEDBOX will flash the blue LED rapidly three times when this is complete in order to provide visual confirmation, and the measured offsets will be stored in non-volatile memory until a new "level now" command is received. Additionally, the computed offsets will be automatically used in order to compensate for small antenna mounting offsets from horizontal relative to the vehicle, unless the "Use the stored roll and pitch offsets" tick-box is subsequently un-ticked (see below).
Use the stored roll and pitch offsets:
When the SPEEDBOX receives a "level now" command, either from the configuration software or from an attached Race Technology dashboard, it will automatically use this levelling data, and thus if the configuration is read back from the unit after sending a "level now" command then the "Use the stored roll and pitch offsets" tick-box will be ticked, regardless of its setting prior to sending the "level now" command. However, if it is subsequently desired not to use the levelling data, the use of the stored data can be disabled by un-ticking this box, and re-enabled by ticking this box if required.
WARNING: If use of the stored data is enabled by ticking this box when it is not known that good levelling data has been previously stored, then the unit may be operating with potentially poor or undefined levelling data.
Virtual Measurement Points:
Up to four additional locations (called "virtual measurement points) can be added for which output data is available on CAN. For each of the virtual measurement points velocity, slip and heading are available in the relevant CAN output message (note: the required CAN message must be enabled in the CAN configuration tab in order to be output).